HIGH END REGLER 2N2N


Der Regler wurde nach dem „Sandwich“-Prinzip gebaut um die kleinsten Abmessungen zu ermöglichen und den signalgebenden und versorgenden Teil zu trennen, damit der Einfluss von Fremdstörungen noch weiter gesenkt werden kann.
Auf dem oberen Foto ist zu erkennen, dass die einzelnen Platten fest miteinander verbunden sind. Es ist zu sehen, dass auf der Vorderseite zwei Schalter angeordnet sind, der eine um die Adresse des Reglers einzugeben, der andere um den Betriebsmodus auszuwählen. Dabei können von vornherein 16 Sets und somit 16 Adressen eingebaut werden (bei einer zusätzlichen Konfiguration noch 32 Adressen, was in Summe 48 einmalige Adressen ergibt). Sonst sind auf der Vorderseite angeordnet der Prozessor, ein Teil des Impulswandlers, Treiber des Signalverstärkers, ein 6-poliger Stecker zum Updaten der Firmware, eine Leuchtdiodenanzeige. Auf der Rückseite befinden sich 12 Schalttransistoren, Temperaturmessfühler, Anschlussleiste für Steuerung, Versorgung, Ausgänge für den Motor.
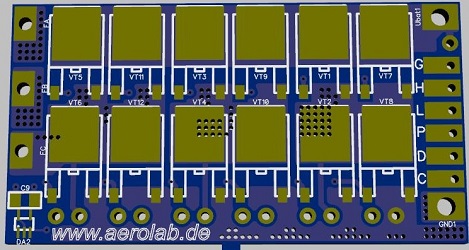
Oberer Anschluss +U – positiver Versorgungspol
Unterer Anschluss GDN – negativer Versorgungspol
Links Ausgänge der Phasen A,B,C – Ausgänge für bürstenlose Motoren
In der Mitte rechts in der Abbildung – Anschlüsse für die Steuerungssignale, Hauptanschlüsse CAN H, CAN L und zusätzliche PWM und I2C. Für PWM wird möglicherweise ein zusätzlicher Anschluss GDN benötigt, oben ist ein Anschluss vorgesehen (Index G auf der Platte).
Die Transistoren sind auf einen Impulsstrom bis 160-170 A ausgelegt. Der Signalverstärker erwärmt sich praktisch nicht beim Betrieb auf einem 2kg schweren Quadrocopter mit den Germany Aerolab T-Motor MT2814 und Rotoren 12х4,5 oder 13х6,5 bei eine Versorgung mit 4S Li-Po (16.8V). Für eine Verbesserung des Betriebes des Reglers wird ein Impulswandler und zur Steuerung des Verstärkers starke Treiber mit bis zu 2A verwendet. Die Verwendung des Impulswandlers wird dadurch erklärt, dass dieser im Betrieb mit über 12V eine stabile Temperatur nicht über 45°C hält, dagegen lineare Wandler, die in den meisten Reglern verbaut sind, sich sehr stark aufwärmen und das sogar ohne Last. Der Wandler wird zur Einstellung der Versorgungsspannung für die Treiber des Verstärkers und andere Elemente der elektrischen Schaltung benötigt. Dieser Reglertyp ist für die Versorgung 4S ausgelegt aber in anderen Versionen werden auch 6S verwendet ohne eine optische Veränderung der Konstruktion.
Benutzung auf Multicoptern
Der Regler kann sowohl autonom, als auch im Verbund mit passenden Adaptern verwendet werden: mit freien Adaptern oder mit eingebautem I2C-PWM-CAN-Wandler.
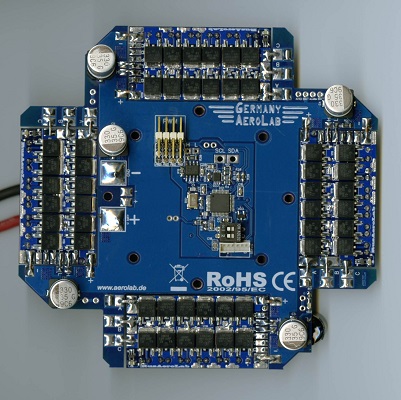
In der Abbildung ist der Adapter der Firma Germany Aerolab für mittlere Quadrocopter dargestellt.
Einige Worte zur Montage der Regler mit dem Adapter:
bei der Verwendung des Adapters müssen die Versorgungsanschlüsse, die Steuerungsanschlüsse (mindestens CAN_H, CAN_L) und die Phasenanschlüsse der bürstenlosen Motoren gelötet werden.
Wie auf der oberen Abbildung zu erkennen ist, befinden sich in unmittelbarer Nähe zu den Versorgungsanschlüssen Elektrolytkondensatoren 470μF 25V für 4S- und 330μF 35V für 6S-Modelle der Regler. Es können auch Kondensatoren bis 1000μF 25V-35V verwendet werden. Wenn der Regler autonom verwendet werden soll, dann wird eindringlich empfohlen die Elektrolytkondensatoren parallel zu der Versorgung (Polarität beachten!) direkt auf die Versorgungsanschlüsse anzulöten: + (Plus) zu U_bat und – (Minus) zu GDN.
Bei einer autonomen Verwendung des Reglers für bürstenlose Motoren kann ein I2C-PWM-CAN-Mini-Adapter mit verkleinerten Abmessungen verwendet werden, der ebenfalls von Germany Aerolab entwickelt wurde und produziert wird.
Achtung:
Bei der autonomen Verwendung des Reglers muss unbedingt ein Elektrolytkondensator verbaut werden (470 – 1000 μF)!
Um jegliche Verletzungen zu vermeiden wird eindringlich empfohlen alle Operationen und Einstellungen der Parameter des Reglers mit vom Motor abmontierten Rotoren durchzuführen!
- Die Polarität der Versorgungsanschlüsse muss beachtet werden!
Der Hersteller übernimmt keine Haftung für entstandene Schäden und Verletzungen.